Running PX4 SIH on Real Hardware: Custom Firmware for In-the-Loop Flight Simulation
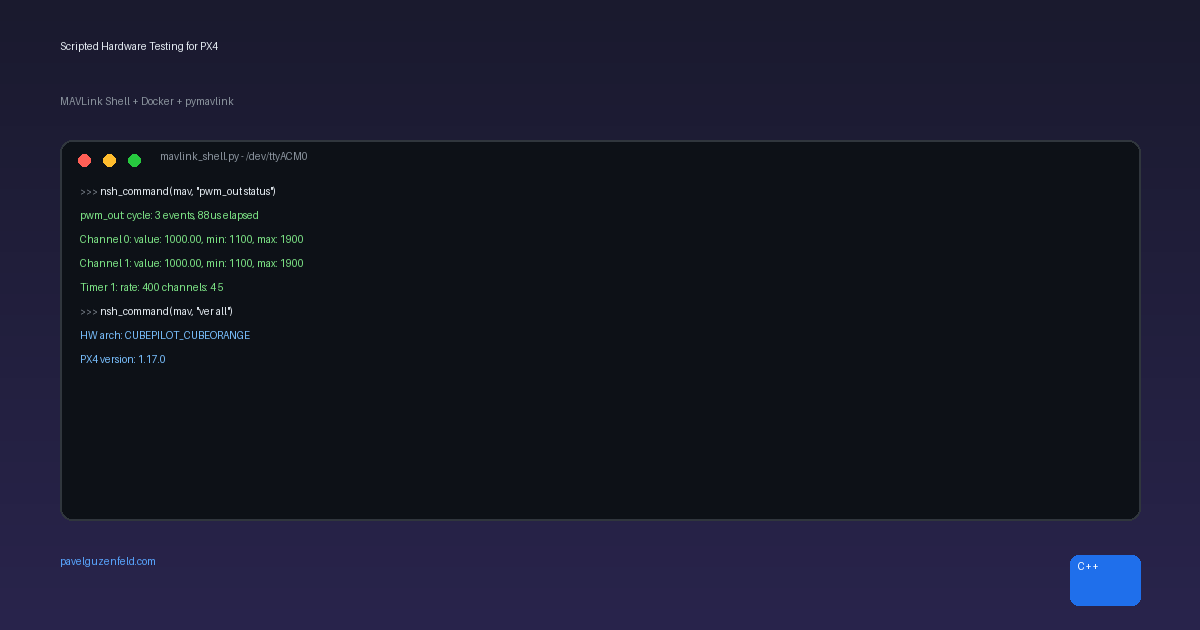
Getting PX4’s Simulation-In-Hardware (SIH) module running on a production flight controller — discovering the firmware doesn’t include SIH, building a custom PX4 with flash-trimming, fan-out routing serial MAVLink to both the simulator and ground station, and connecting it all to the Unity visualization pipeline.