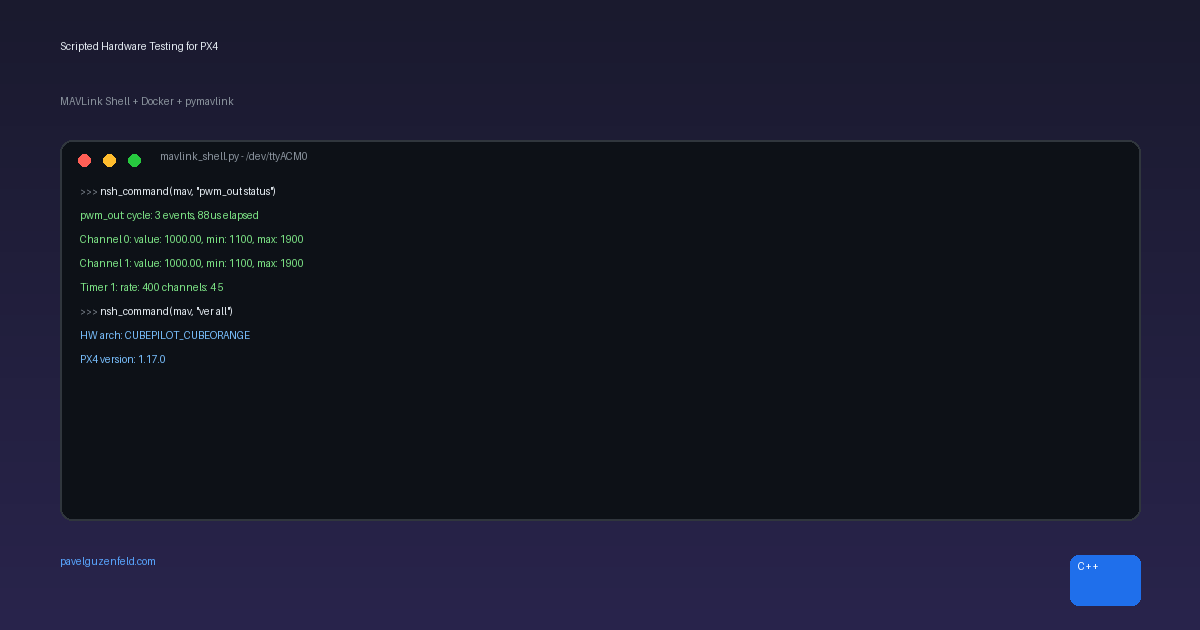
Scripted Hardware Testing for PX4 — MAVLink Shell, Docker, and pymavlink
How to script PX4 hardware verification using pymavlink’s SERIAL_CONTROL protocol over a USB connection — download CI firmware, flash from the command line, and run NSH commands programmatically. No QGroundControl required.